
Redacción
El desarrollo de prótesis avanzadas dio un nuevo paso con la creación de una mano robótica híbrida por parte de ingenieros de la Universidad Johns Hopkins. Inspirada en la anatomía humana, esta prótesis combina estructuras rígidas y blandas para ofrecer un control preciso y una sensación táctil realista.
Su capacidad para ajustar el agarre sin dañar los objetos representa un avance significativo en el campo de la neuroingeniería y la robótica médica. El estudio fue publicado en Science Advances.
La mayoría de las manos robóticas actuales presentan una limitación fundamental: o son demasiado rígidas, lo que dificulta la manipulación de objetos delicados, o son demasiado blandas y carecen de firmeza para sujetar elementos más pesados, indicó el medio de tecnología Tech Xplore.
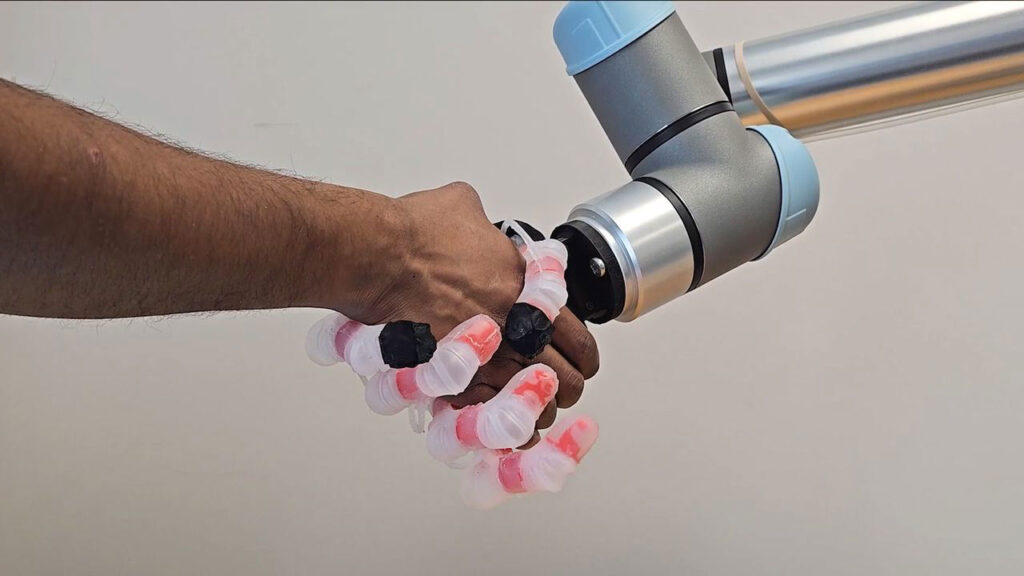
Para solucionar este problema, el equipo de Johns Hopkins diseñó una prótesis que imita la combinación de huesos, tejidos y articulaciones flexibles de la mano humana. El dispositivo incorpora una estructura interna impresa en 3D con polímeros similares al caucho, lo que le permite adaptarse a objetos de distintas texturas y formas.
Además, cuenta con tres capas de sensores táctiles inspirados en la piel humana, capaces de detectar no solo el contacto, sino también variaciones en la presión y el deslizamiento.
“Desde el principio, el objetivo ha sido crear una mano protésica que se sienta y funcione como una extremidad real”, explicó Sriramana Sankar, ingeniero biomédico de Johns Hopkins y líder del proyecto, en un comunicado de la universidad.
“Queremos que las personas con pérdida de extremidades superiores puedan interactuar libremente con su entorno y sostener a sus seres queridos sin temor a lastimarlos”, agregó.
Tecnología bioinspirada
Uno de los aspectos más innovadores de la prótesis es su sistema de control basado en señales musculares. Los músculos del antebrazo envían órdenes a los dedos artificiales, permitiendo movimientos naturales e intuitivos.
A esto se suma el uso de inteligencia artificial y aprendizaje automático, que procesan la información sensorial y traducen los estímulos en señales nerviosas artificiales.
“Nuestro sistema está inspirado en los nervios: modela los receptores táctiles de la mano para producir mensajes similares a los nervios, de modo que el ‘cerebro’ de la prótesis, o su computadora, comprenda si algo está caliente o frío, blando o duro, o si se está resbalando de la mano”, señaló Nitish Thakor, profesor de ingeniería biomédica en Johns Hopkins, según Tech Xplore. Por lo que, si un objeto comienza a resbalarse de su agarre, la mano ajusta automáticamente la presión para evitar que caiga.
Para evaluar su desempeño, los investigadores probaron la mano en un entorno de laboratorio con 15 objetos cotidianos, entre ellos juguetes de peluche, esponjas, cajas de cartón, botellas de agua y piñas.
Los resultados mostraron que la prótesis pudo manipular todos los elementos con una precisión del 99,69%, superando a otras alternativas en el mercado, informó la universidad.
Uno de los experimentos más destacados consistió en levantar un vaso de plástico delgado y lleno de agua usando solo tres dedos. A diferencia de otras prótesis, que suelen ejercer demasiada presión y deformar el vaso, la mano híbrida ajustó su agarre con precisión, informó la universidad. “Estamos combinando lo mejor de la robótica rígida y blanda para imitar el comportamiento de la mano humana”, afirmó Sankar.
Impacto en prótesis y robótica
Además de su potencial en el campo médico, esta tecnología podría influir en el diseño de manos robóticas industriales y de servicio, que requieren manipular objetos delicados sin dañarlos.
Según los investigadores, las mejoras futuras incluirán mayor fuerza de agarre, sensores adicionales y materiales más resistentes. “Las manos robóticas del futuro no solo manejarán objetos pesados. También trabajarán con materiales como vidrio, tela o dispositivos electrónicos. Por eso es crucial desarrollar sistemas híbridos que combinen precisión y sensibilidad”, señaló Thakor en el comunicado de la universidad.
Fuente: Infobae