
Redacción
Los océanos contienen en la actualidad entre 26 y 66 millones de toneladas de desechos, con el 94% depositado en el lecho marino. Hasta ahora, los esfuerzos de recolección se han centrado principalmente en los desechos superficiales, y los realizados para retirar desechos submarinos involucran a buzos humanos que trabajan en condiciones peligrosas. Un grupo de investigadores, respaldado por la Unión Europea (UE), está desarrollando la primera flota de robots autónomos inteligentes para combatir los residuos tanto en la superficie como en el fondo del océano.
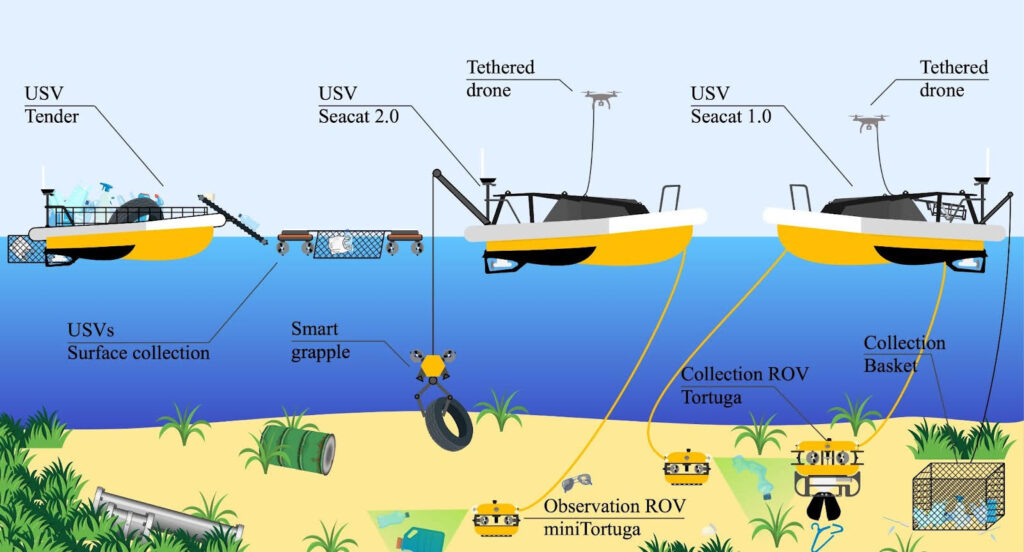
El proyecto SeaClear2.0, financiado con fondos comunitarios, desarrolla el primer sistema robótico autónomo y de inteligencia artificial capaz de encontrar y retirar residuos del fondo del océano. La idea es desplegar una flota de robots inteligentes para identificar primero y eliminar después los desechos marinos. El sistema emplea una combinación de drones aéreos, rovers submarinos, naves de superficie autónomas y pinzas robóticas fabricadas a medida.
Usando inteligencia artificial, los robots pueden identificar, localizar y recolectar basura de forma autónoma. El equipo tiene como objetivo ampliar significativamente las capacidades del sistema predecesor, el SeaClear1.0, que ya está superando las pruebas con gran éxito.
El núcleo tecnológico de SeaClear2.0 es un sistema robótico muy mejorado para la recolección automatizada de basura, que puede ir más profundo que SeaqClear1.0, levantar basura más pesada y abordar además la basura superficial.
SeaClear2.0 detectará los residuos con un sonar de alta resolución, así como otros tipos de sensores. Se desarrollará también una garra inteligente y maniobrable que pueda recoger basura de gran tamaño, como llantas, bicicletas o tuberías.
Las primeras pruebas, en el Mediterráneo
Para transportar la basura más voluminosa y pesada, los científicos diseñarán un nuevo ténder con cámaras divisorias flexibles para diferentes fracciones de basura, similares a los divisores de cajones ajustables.
La basura de la superficie se recogerá a través de un equipo móvil autónomo que puede trabajar en áreas confinadas y poco profundas. Con casi 500 millones de toneladas de plásticos que llegan a los mares europeos cada año, las soluciones tecnológicas para identificar y eliminar la basura deben combinarse con “intervenciones sociales para prevenir y reducir la producción y liberación de basura por parte de los ciudadanos”, señalan los impulsores del proyecto.
Así, SeaClear2.0 prevé empoderar y activar a los ciudadanos a través de actividades de participación que incluyan narraciones geográficas, una aplicación de informes de basura gamificada, limpiezas, exhibiciones, concursos e instalaciones artísticas.
El equipo también propondrá mejores soluciones de clasificación y reciclaje para aumentar el valor de la basura recolectada, y trabajará con las comunidades locales para desarrollar recomendaciones de políticas novedosas y así abordar las brechas existentes en las políticas actuales.
El nuevo sistema mejorado se mostrará en tres demostraciones a gran escala y tres pruebas piloto en todo el Mediterráneo. Además, el proyecto financiará cinco subproyectos para validar partes del sistema y el enfoque en otras regiones de la cuenca mediterránea.
El proyecto SeaClear2.0 comenzó el pasado 1 de enero y tendrá una duración de cuatro años. La reunión de lanzamiento ya está planificada para el 14 de febrero, en Delft, Países Bajos.
Una ‘nave nodriza’, un dron y dos ‘tortugas’
El proceso comienza con el uso de una embarcación de superficie no tripulada, el ‘SeaCat’, que escanea el fondo del mar, elabora un mapa batimétrico 3D y marca cualquier desecho grande que encuentre.
El ‘SeaCat’ también sirve como la ‘nave nodriza’ del sistema: todos los demás robots se despliegan, se comunican y regresan a él. También obtienen energía de él a través de cables. Los recursos computacionales necesarios para los componentes de detección, control e inteligencia artificial están asimismo alojados en ‘SeaCat’.
Cuando el agua es lo suficientemente transparente, un vehículo aéreo no tripulado (un dron DJI Matrice M210 RTK modificado) busca basura desde el aire. Se espera que las bolsas de basura más grandes sean identificables de esta manera e informen la búsqueda más detallada utilizando el robot submarino en el siguiente paso.
Un pequeño vehículo submarino no tripulado, la ‘miniTortuga’ se despliega a continuación desde el ‘SeaCat’ y realiza exploraciones específicas en primer plano del fondo del mar para encontrar basura más pequeña. Con este fin, utiliza una cámara y un sonar de visión frontal, junto con otros sensores, como detectores de metales. Todo ello se agrega al mapa que sitúa los desperdicios.
La basura se identifica con inteligencia artificial y técnicas de reconocimiento de objetos de aprendizaje profundo. Estas redes profundas están entrenadas para diferenciar la basura de la vida marina y, por lo tanto, garantizar que el sistema solo recolecte lo que debe.
Después actúa un segundo robot marino, llamado ‘Tortuga’, equipado con una pinza que incluye un dispositivo de succión que ayuda a recoger la basura en circunstancias difíciles, como cuando está entre algas. Cada pieza de basura se recupera con gran precisión y luego se recoge.
Para planificar las rutas y controlar el movimiento de los robots de observación y recolección, se explotan técnicas inteligentes, como el aprendizaje por refuerzo y el control basado en datos.
Finalmente, se despliega una canasta desde el ‘SeaCat’, y el robot ‘Tortuga’ toma cada pieza de basura y la deposita en ella para transportarla a continuación hasta la orilla. La abertura de la canasta está especialmente diseñada para interactuar de manera efectiva con la pinza y evitar que la basura flotante regrese al agua.